Courtesy of NASA's National Space Science Data Center
| Related Information |
|
Mars Pathfinder Mission Mars Pathfinder Spacecraft Water History, Rock Composition Mars Introduction The Surface of Mars History of Space Exploration Mars Image/Animation Gallery |
On-orbit dry mass: 10.50 kg
Nominal Power Output: 13.00 W
Introduction
 The Mars Pathfinder was the second of NASA's low-cost planetary Discovery missions to
be launched. The mission consists of a stationary lander and a surface rover. The mission
had the primary objective of demonstrating the feasibility of low-cost landings on and
exploration of the Martian surface. This objective was met by tests of communications
between the rover and lander, and the lander and
Earth, tests of the imaging devices and
sensors, and tests of the maneuverability and systems of the rover on the surface. The
scientific objectives include atmospheric entry science, long-range and close-up surface
imaging, rock and soil composition and material properties experiments, and meteorology,
with the general objective being to characterize the
Martian environment for further
exploration. (Mars Pathfinder was formerly known as the
Mars Environmental Survey (MESUR) Pathfinder.)
The Mars Pathfinder was the second of NASA's low-cost planetary Discovery missions to
be launched. The mission consists of a stationary lander and a surface rover. The mission
had the primary objective of demonstrating the feasibility of low-cost landings on and
exploration of the Martian surface. This objective was met by tests of communications
between the rover and lander, and the lander and
Earth, tests of the imaging devices and
sensors, and tests of the maneuverability and systems of the rover on the surface. The
scientific objectives include atmospheric entry science, long-range and close-up surface
imaging, rock and soil composition and material properties experiments, and meteorology,
with the general objective being to characterize the
Martian environment for further
exploration. (Mars Pathfinder was formerly known as the
Mars Environmental Survey (MESUR) Pathfinder.)
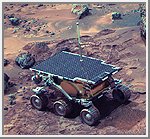
 The rover, which has been named "Sojourner" is a six-wheeled vehicle, 280 mm
high, 630 mm long, and 480 mm wide with a ground clearance of 130 mm, mounted on a
"rocker-bogie" suspension. The rover was stowed on the lander at a height of 180
mm. At deployment, the rover extended to its full height and rolled down a deployment ramp
at about 05:40 UT on 6 July 1997 (1:40 a.m. EDT). The rover was controlled by an
Earth-based operator who used images obtained by both the rover and lander systems. Note
that the time delay was between 10 and 15 minutes depending on the relative position of
Earth and Mars over the course of the mission, requiring some autonomous control, provided
by a hazard avoidance system on the rover. The on-board control system is an Intel 80C85
8-bit processor which runs about 100,000 instructions per second. The computer is capable
of compressing and storing a single image on-board. The rover is powered by 0.2 square
meters of solar cells, which will provide energy for several hours of operations per sol
(1 Martian day = 24.6 Earth hours). Non-rechargeable lithium thionyl chloride (LiSOCl2)
D-cell batteries provide backup. All rover communications were done through the lander.
The rover, which has been named "Sojourner" is a six-wheeled vehicle, 280 mm
high, 630 mm long, and 480 mm wide with a ground clearance of 130 mm, mounted on a
"rocker-bogie" suspension. The rover was stowed on the lander at a height of 180
mm. At deployment, the rover extended to its full height and rolled down a deployment ramp
at about 05:40 UT on 6 July 1997 (1:40 a.m. EDT). The rover was controlled by an
Earth-based operator who used images obtained by both the rover and lander systems. Note
that the time delay was between 10 and 15 minutes depending on the relative position of
Earth and Mars over the course of the mission, requiring some autonomous control, provided
by a hazard avoidance system on the rover. The on-board control system is an Intel 80C85
8-bit processor which runs about 100,000 instructions per second. The computer is capable
of compressing and storing a single image on-board. The rover is powered by 0.2 square
meters of solar cells, which will provide energy for several hours of operations per sol
(1 Martian day = 24.6 Earth hours). Non-rechargeable lithium thionyl chloride (LiSOCl2)
D-cell batteries provide backup. All rover communications were done through the lander.
 The rover is equipped with black and white and color imaging systems which were used to
image the lander in order to assess its condition after touchdown. The goal was to acquire
three black and white images spaced 120 degrees apart of the lander. Images of the
surrounding terrain were also acquired to study size and distribution of soils and rocks,
as well as locations of larger features. Imaging of the rover wheel tracks will be used to
estimate soil properties. Imaging of the rover by the lander was also done to assess rover
performance and soil and site properties. The rover's performance was monitored to
determine tracking capabilities, drive performance, thermal behavior, and sensor
performance. UHF Communications between the rover and lander were studied to determine the
effectiveness of the link between the rover and lander. Assessments of rock and soil
mechanics will be made based on abrasion of the wheels and adherence of dust. An
alpha-proton-X-ray spectrometer (APXS) is on-board the rover to assess the composition of
rocks and soil. Images of all samples tested are transmitted to Earth. The primary
objectives were scheduled for the first seven sols, all within about 10 meters of the
lander. The extended mission included slightly longer trips away from the lander, and even
longer journeys were planned. Images were taken and experiments performed by the lander
and rover until 27 September 1997 when communications were lost for unknown reasons.
The rover is equipped with black and white and color imaging systems which were used to
image the lander in order to assess its condition after touchdown. The goal was to acquire
three black and white images spaced 120 degrees apart of the lander. Images of the
surrounding terrain were also acquired to study size and distribution of soils and rocks,
as well as locations of larger features. Imaging of the rover wheel tracks will be used to
estimate soil properties. Imaging of the rover by the lander was also done to assess rover
performance and soil and site properties. The rover's performance was monitored to
determine tracking capabilities, drive performance, thermal behavior, and sensor
performance. UHF Communications between the rover and lander were studied to determine the
effectiveness of the link between the rover and lander. Assessments of rock and soil
mechanics will be made based on abrasion of the wheels and adherence of dust. An
alpha-proton-X-ray spectrometer (APXS) is on-board the rover to assess the composition of
rocks and soil. Images of all samples tested are transmitted to Earth. The primary
objectives were scheduled for the first seven sols, all within about 10 meters of the
lander. The extended mission included slightly longer trips away from the lander, and even
longer journeys were planned. Images were taken and experiments performed by the lander
and rover until 27 September 1997 when communications were lost for unknown reasons.
The landing site in the Ares Vallis region of Mars is at 19.33 N, 33.55 W. The lander has been named the Sagan Memorial Station. The Ares Vallis region of Mars is a large outwash plain near Chryse Planitia. This region is one of the largest outflow channels on Mars, the result of a huge flood (possibly an amount of water equivalent to the volume of all five Great Lakes) over a short period of time flowing into the martian northern lowlands.
The Mars Pathfinder mission cost approximately $265 million including launch and operations. Development and construction of the lander cost $150 million and the rover about $25 million.