|
COMETS EARTH JUPITER KUIPER BELT MARS MERCURY METEORITES NEPTUNE OORT CLOUD PLUTO SATURN SOLAR SYSTEM SPACE SUN URANUS VENUS ORDER PRINTS
PHOTO CATEGORIES SCIENCEVIEWS AMERICAN INDIAN AMPHIBIANS BIRDS BUGS FINE ART FOSSILS THE ISLANDS HISTORICAL PHOTOS MAMMALS OTHER PARKS PLANTS RELIGIOUS REPTILES SCIENCEVIEWS PRINTS
|
Related Document
Download Options
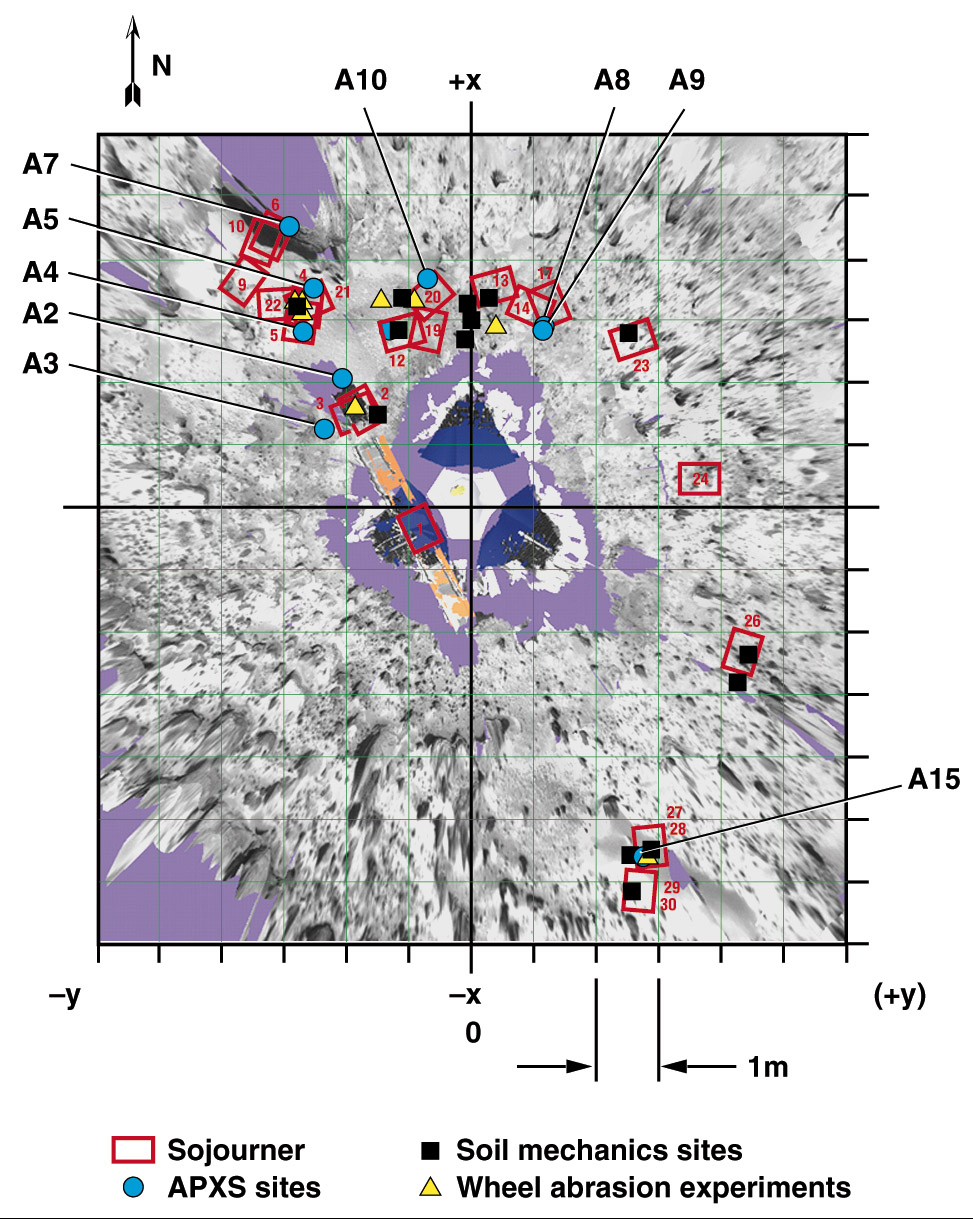
Overhead view of the area surrounding the Pathfinder lander illustrating the Sojourner traverse. Red rectangles are rover positions at the end of sols 1-30. Locations of soil mechanics experiments, wheel abrasion experiments, and APXS measurements are shown. The A numbers refer to APXS measurements as discussed in the paper by Rieder et al. (p. 1770, Science Magazine, see image note). Coordinates are given in the LL frame. The photorealistic, interactive, three-dimensional virtual reality (VR) terrain models were created from IMP images using a software package developed for Pathfinder by C. Stoker et al. as a participating science project. By matching features in the left and right camera, an automated machine vision algorithm produced dense range maps of the near field, which were projected into a three- dimensional model as a connected polygonal mesh. Distance and angle measurements can be made on features viewed in the model using a mouse- driven three-dimensional cursor and a point-and-click interface. The VR model also incorporates graphical representations of the lander and rover and the sequence and spatial locations at which rover data were taken. As the rover moved, graphical models of the rover were added for each position that could be uniquely determined using stereo images of the rover taken by the IMP. Images taken by the rover were projected into the model as two-dimensional 'billboards' to show the proper perspective of these images. NOTE: original caption as published in Science Magazine, Volume 278, Number 5344, 5 December 1997, 'Mars Pathfinder Foldout' (Plate 3). Mars Pathfinder is the second in NASA's Discovery program of low-cost spacecraft with highly focused science goals. |

{kind=link}
{kind=link}