|
COMETS EARTH JUPITER KUIPER BELT MARS MERCURY METEORITES NEPTUNE OORT CLOUD PLUTO SATURN SOLAR SYSTEM SPACE SUN URANUS VENUS ORDER PRINTS
PHOTO CATEGORIES SCIENCEVIEWS AMERICAN INDIAN AMPHIBIANS BIRDS BUGS FINE ART FOSSILS THE ISLANDS HISTORICAL PHOTOS MAMMALS OTHER PARKS PLANTS RELIGIOUS REPTILES SCIENCEVIEWS PRINTS
|
Related Document
Download Options
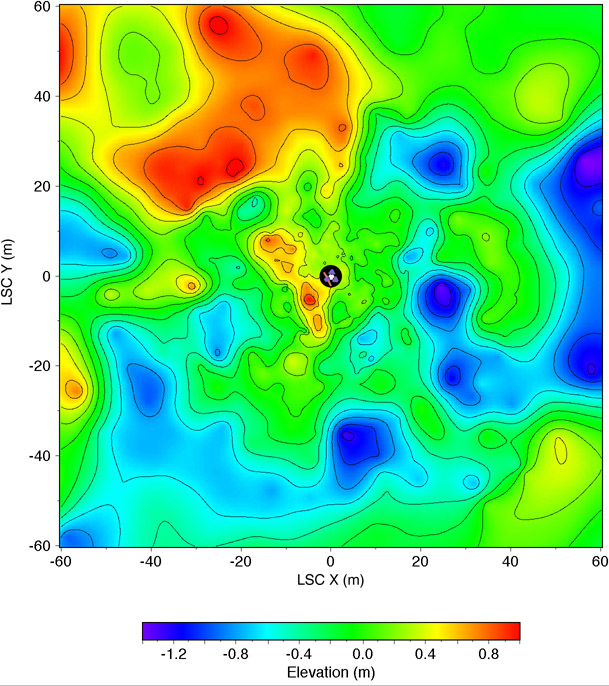
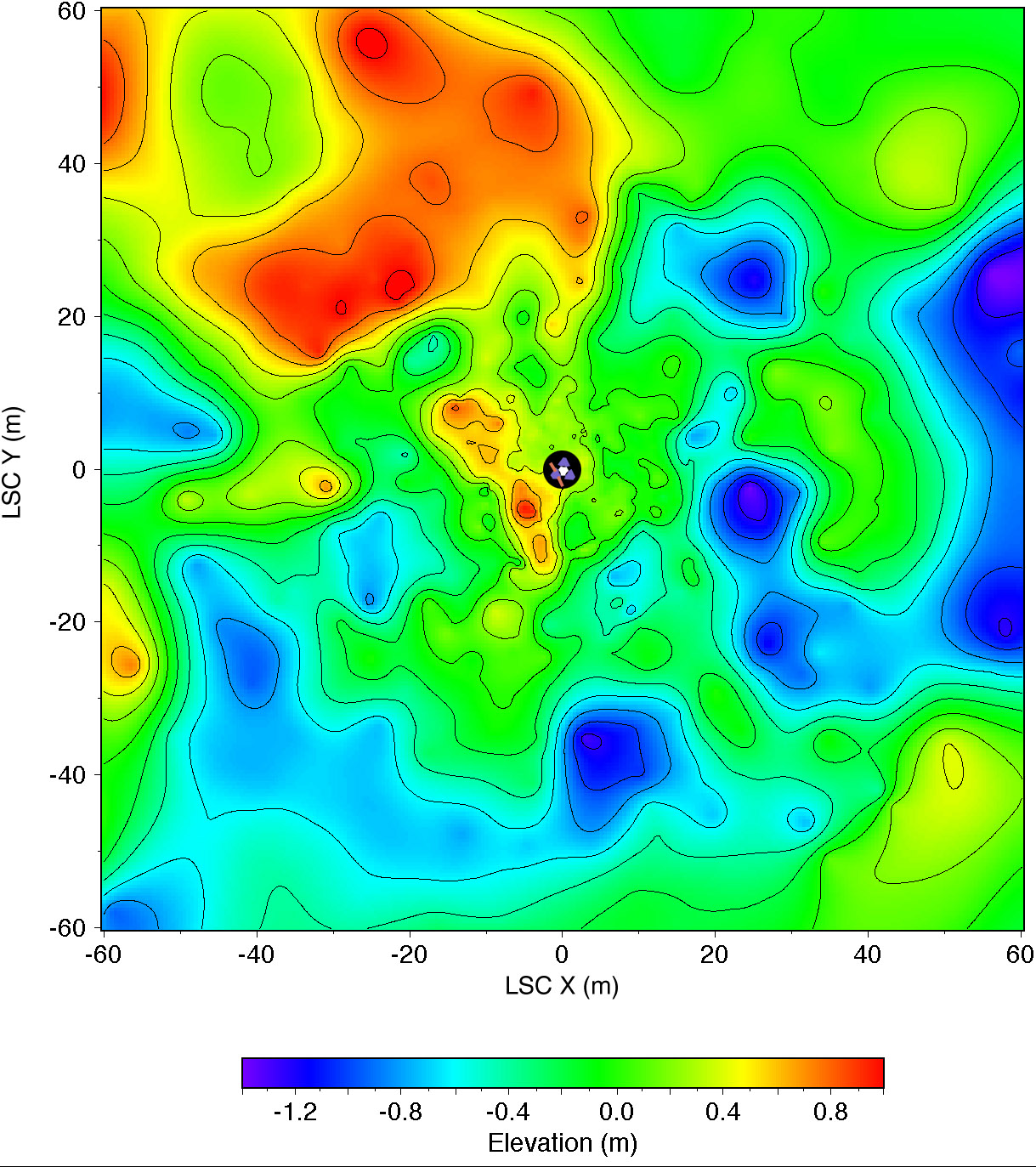
Topographic map of the landing site, to a distance of 60 meters from the lander in the LSC coordinate system. The lander is shown schematically in the center; 2.5 meter radius circle (black) centered on the camera was not mapped. Gentle relief [root mean square (rms) elevation variation 0.5 m; rms adirectional slope 4O] and organization of topography into northwest and northeast-trending ridges about 20 meters apart are apparent. Roughly 30% of the illustrated area is hidden from the camera behind these ridges. Contours (0.2m interval) and color coding of elevations were generated from a digital terrain model, which was interpolated by kriging from approximately 700 measured points. Angular and parallax point coordinates were measured manually on a large (5m length) anaglyphic uncontrolled mosaic and used to calculate Cartesian (LSC) coordinates. Errors in azimuth on the order of 1O are therefore likely; elevation errors were minimized by referencing elevations to the local horizon. The uncertainty in range measurements increases quadratically with range. Given a measurement error of 1/2 pixel, the expected precision in range is ~ 0.3 meter at 10 meter range, and ~ 10 meters at 60 meter range. Repeated measurements were made, compared, and edited for consistency to improve the range precision. Systematic errors undoubtedly remain and will be corrected in future maps compiled digitally from geometrically controlled images. Cartographic processing by U.S. Geological Survey. NOTE: original caption as published in Science Magazine, Volume 278, Number 5344, 5 December 1997, 'Mars Pathfinder Foldout' (Plate 4). Mars Pathfinder is the second in NASA's Discovery program of low-cost spacecraft with highly focused science goals. |
{kind=link}
{kind=link}